سنسور چیست؟ سنسور یخچال فریزر؟ ترمیستور

سنسورهای که در یخچال فریزرها استفاده میشوند اکثریت از نوع سنسور ان تی سی یا NTC سنسور میباشند. که NTC مخفف NEGATIVE THERMAL COEFFICIENT یا NEGATIVE TEMPERATURE COEFFICIENT یا به عبارت صحیحتر و بینالمللی آن ترمیستور THERMISTOR میباشد. یعنی با افزایش دما ضریب هدایت الکتریکی آنها افزایش مییابد. یا به عبارت دیگر با افزایش دما مقاومت الکتریکی آنها کاهش مییابد. که در نوع PTC یا positive thermal coefficeint برعکس این حالت هست. یعنی با افزایش دما مقاومت الکتریکیشان افزایش مییابد. ptc ها امروزه بیشتر جای رلههای مکانیکی کمپرسورهای یخچال فریزر را گرفتهاند. به عنوان مثال در سنسورهای یخچال سامسونگ، در دمای منفی ۵۰ مقاومت آن برابر ۱۵۳۳۱۹ اهم میباشد در حالی که در دمای مثبت ۸۴ دارای ۸۱۰ اهم میباشد.
ترمیستورها از نیمههادی ها تشکیل شدهاند. و با تغییر دما میزان مقاومت آنها تغییر میکند. یعنی وقتی یک ترمیستور در داخل یخچال فریزر باشد گزارش لحظه به لحظه تغییرات دمایی را به برد الکترونیک میدهد و میکروپرسسور برد یا مغز پردازشگر برد الکترونیک یخچال فریزر میتواند طبق برنامه داده شده به آن فرمان مناسب را صادر کند. و این ترمیستورها در یخچال فریزرهای جدید این امکان رو به ما داده است تا از هر زمان دیگر یخچال فریزرهای بهتر و هوشمندتری را داشته باشیم.
سنسور چیست؟
سنسور المان حسکنندهای است که کمیتهای فیزیکی مانند فشار، حرارت، رطوبت، دما، و … را به کمیتهای الکتریکی پیوسته (آنالوگ) یا غیرپیوسته (دیجیتال) تبدیل میکند. در واقع آن یک وسیله الکتریکی است که تغییرات فیزیکی یا شیمیایی را اندازهگیری میکند و آن را به سیگنال الکتریکی تبدیل مینماید.
سنسورها در انواع دستگاههای اندازهگیری، سیستمهای کنترل آنالوگ و دیجیتال مانند PLC مورد استفاده قرار میگیرند. عملکرد سنسورها و قابلیت اتصال آنها به دستگاههای مختلف از جمله PLC باعث شده است که سنسور بخشی از اجزای جدانشدنی دستگاه کنترل اتوماتیک و رباتیک باشد. سنسورها اطلاعات مختلف از وضعیت اجزای متحرک سیستم را به واحد کنترل ارسال نموده و باعث تغییر وضعیت عملکرد دستگاهها میشوند.
- حسگرهای رطوبت
- حسگر حرکت
- زوج حسگر اولتراسونیک (مافوق صوت)
- سنسورهای بدون تماس
سنسورهای بدون تماس سنسورهائی هستند که با نزدیک شدن یک قطعه وجود آن را حس کرده و فعال میشوند. این عمل به نحوی است که میتواند باعث جذب یک رله، کنتاکتور و یا ارسال سیگنال الکتریکی به طبقه ورودی یک سیستم گردد.
مثالهایی از کاربرد سنسورها
- شمارش تولید: سنسورهای القائی، خازنی و نوری
- کنترل حرکت پارچه و …: سنسور نوری و خازنی
- کنترل سطح مخازن: سنسور نوری و خازنی و خازنی کنترل سطح
- تشخیص پارگی ورق: سنسور نوری
- کنترل انحراف پارچه: سنسور نوری و خازنی
- کنترل تردد: سنسور نوری
- اندازه گیری سرعت: سنسور القائی و خازنی
- اندازه گیری فاصله قطعه: سنسور القائی آنالوگ
مزایای سنسورهای بدون تماس یا همجواری
سرعت سوئیچینگ زیاد:
سنسورها در مقایسه با کلیدهای مکانیکی از سرعت سوئیچینگ بالائی برخوردارند، به طوریکه برخی از آنها (سنسور القائی سرعت) با سرعت سوئیچینگ تا ۲۵KHz کار میکنند.
طول عمر زیاد:
بدلیل نداشتن کنتاکت مکانیکی و عدم نفوذ آب، روغن، گرد و غبار و … دارای طول عمر زیادی هستند.
عدم نیاز به نیرو و فشار:
با توجه به عملکرد سنسور هنگام نزدیک شدن قطعه، به نیرو و فشار نیازی نیست.
قابل استفاده در محیطهای مختلف با شرایط سخت کاری:
سنسورها در محیطهای با فشار زیاد، دمای بالا، اسیدی، روغنی، آب و … قابل استفاده می باشند.
عدم ایجاد نویز در هنگام سوئیچینگ:
به دلیل استفاده از نیمه هادی ها در طبقه خروجی، نویزهای مزاحم (Bouncing Noise) ایجاد نمی شود.
سنسورهای القائی
سنسورهای القائی سنسورهای بدون تماس هستند که تنها در مقابل فلزات عکس العمل نشان می دهند و می توانند فرمان مستقیم به رله ها، شیرهای برقی، سیستمهای اندازه گیری و مدارات کنترل الکتریکی (مانند PLC) ارسال نمایند.
اساس کار و ساختمان سنسورهای القائی
ساختمان این سنسورها از چهار طبقه تشکیل می شود: اسیلاتور، دمدولاتور، اشمیت تریگر، تقویت خروجی.
اسیلاتور:
قسمت اساسی این سنسورها از یک اسیلاتور با فرکانس بالا تشکیل یافته که می تواند توسط قطعات فلزی تحت تاثیر قرار گیرد. این اسیلاتور باعث بوجود آمدن میدان الکترومغناطیسی در قسمت حساس سنسور می شود. نزدیک شدن یک قطعه فلزی باعث بوجود آمدن جریانهای گردابی در قطعه گردیده و این عمل سبب جذب انرژی میدان می شود و در نتیجه دامنه اسیلاتور کاهش می یابد. از آنجا که طبقه دمدلاتور، آشکارساز دامنه اسیلاتور است در نتیجه کاهش دامنه اسیلاتور توسط این قسمت به طبقه اشمیت تریگر منتقل می شود. کاهش دامنه اسیلاتور باعث فعال شدن خروجی اشمیت تریگر گردیده و این قسمت نیز به نوبه خود باعث تحریک طبقه خروجی می شود.
قطعه استاندارد:
یک قطعه مربعی شکل از فولاد ST37 است که از آن به منظور تست فاصله سوئیچینگ استفاده می شود. (استاندارد IEC947-5-2). ضخامت قطعه ۱mm و طول ضلع این مربع در اندازه های زیر می تواند انتخاب شود.
- به اندازه قطر سنسور
- سه برابر فاصله سوئیچینگ نامی سنسور ۳*Sn
ضرایب تصحیح:
فاصله سوئیچینگ با کوچکتر شدن ابعاد قطعه استاندارد و یا با بکارگیری فلز دیگری غیر از فولاد ST37 تغییر خواهد کرد. در زیر ضرایب تصحیح برای فلزات مختلف نشان داده شده است:
- ضریب تصحیح (KM) برای فولاد ST37 برابر ۱٫۰
- ضریب تصحیح (KM) برای نیکل برابر ۰٫۹
- ضریب تصحیح (KM) برای برنج برابر ۰٫۵
- ضریب تصحیح (KM) برای مس برابر ۰٫۴۵
- ضریب تصحیح (KM) برای آلومینیوم برابر ۰٫۴
به عنوان مثال هرگاه یک سنسور در مقابل فولاد از فاصله ۱۰mm عمل سوئیچینگ را انجام دهد، همان سنسور در مقابل مس از فاصله ۴٫۵mm عمل خواهد کرد.
فرکانس سوئیچینگ:
حداکثر تعداد قطع و وصل یک سنسور در یک ثانیه می باشد. (بر حسب Hz). این پارامتر طبق استاندارد DIN EN 50010 با شرایط زیر اندازه گرفته می شود:
فاصله سوئیچینگ Switching Distance) S):
فاصله بین قطعه استاندارد و سطح حساس سنسور به هنگام عمل سوئیچینگ می باشد. (استاندارد EN 50010)
فاصله سوئیچینگ نامی Nominal Switching Distance) Sn):
فاصله ای است که در حالت متعارف و بدون در نظر گرفتن پارامترهای متغیر از قبیل حرارت، ولتاژ تغذیه و غیره تعریف شده است.
فاصله سوئیچینگ موثر Effective Switching Distance) Sr):
فاصله سوئیچینگ تحت شرایط ولتاژ نامی و حرارت ۲۰ درجه سلسیوس می باشد. در این حالت تلرانسها و پارامترهای متغیر نیز در نظر گرفته شده اند. ۰٫۹Sn<SR<1.1SN>
فاصله سوئیچینگ مفید Useful Switching Distance) Su):
فاصله ای است که در محدوده حرارت و ولتاژ مجاز، عمل سوئیچینگ انجام می شود. ۰٫۸۱Sn<SU<1.21SN
فاصله سوئیچینگ عملیاتی Operating Switching Distance) Sa):
فاصله ای است که تحت شرایط مجاز، عملکرد سنسور تضمین شده است. ۰<SA<0.81SN
هیسترزیس H:
فاصله بین نقطه وصل شدن (هنگام نزدیک شدن قطعه به سنسور) و نقطه قطع شدن (هنگام دورشدن قطعه از سنسور) می باشد. حداکثر این مقدار ۱۰% مقدار نامی می باشد. (استاندارد EN 60947-5-2)
قابلیت تکرار Repeatability) R):
قابلیت تکرار فاصله سوئیچینگ مفید تحت ولتاژ تغذیه V و در شرایط زیر اندازه گیری می شود: حرارت محیط: ۲۳ درجه سلسیوس؛ رطوبت محیط: ۵۰ الی ۷۰ درصد؛ زمان تست: ۸ ساعت. (مقدار تلرانس برای این پارامتر طبق استاندارد EN 60947-5-2 حداکثر +-۰٫۱Sr می باشد.)
پایداری حرارتی (Temperature Drift):
تغییرات فاصله موثر سوئیچینگ در اثر تغییرات دما طبق استاندارد EN 60947-5-2 و در محدوده دمای ۲۰ درجه سلسیوس زیر
صفر تا ۶۰ درجه سلسیوس بالای صفر حداکثر ۱۰% است.
حرارت محیط (Ambient Temperature) Ta:
محدوده حرارتی است که در آن محدوده، عملکرد سنسور تضمین شده است.
کلاس حفاظتی: (IP67 (DIN 40050
نحوه نصب سنسورهای القائی
هرگاه دو یا چند سنسور القائی در مجاورت هم و یا در مقابل هم نصب شوند، شرایط زیر باید رعایت شود:
الف) نحوه نصب سنسورهای القائی Flush:
سنسورهای (Flush (Shielded سنسورهائی هستند که قسمت حساس سنسور توسط پوسته فلزی محصور شده است. هرگاه دو یا چند عدد از این سنسورها همسطح روی بدنه فلزی دستگاه نصب شوند رعایت فواصل نصب الزامی می باشد.
ب) نحوه نصب سنسورهای القائی Non-Flush:
در سنسورهای (Non-Flush (UnShielded قسمت حساس سنسور خارج از پوسته فلزی آن می باشد. فاصله سوئیچینگ این
نوع سنسورها بیشتر از سنسورهای Flush می باشد. اما فرکانس سوئیچینگ آن در مقایسه کمتر است.
ج) نحوه نصب سنسورهای القائی در مقابل هم:
هر گاه دو سنسور القائی در مقابل هم نصب شوند رعایت فاصله حداقل ۶Sn الزامی می باشد
حسگرها در رباتیک
سنسورها در واقع ابزار ارتباط ربات با دنیای خارج و کسب اطلاعات محیطی و نیز داخلی می باشند. انتخاب درست حسگرها تأثیر بسیار زیادی در میزان کارایی ربات دارد. بسته به نوع اطلاعاتی که ربات نیاز دارد از حسگرهای مختلفی می توان استفاده نمود:
- فاصله
- رنگ
- نور
- صدا
- حرکت و لرزش
- دما
- دود
- و…
حسگرهای مورد استفاده در رباتیک:
انواع سنسورها در رباتها مورد استفاده قرار می گیرند:
الف) حس گرهای تماسی (Contact)
مهمترین کاربردهای این حسگرها به این شرح می باشد:
- آشکارسازی تماس دو جسم
- اندازه گیری نیروها و گشتاورهایی که حین حرکت ربات بین اجزای مختلف آن ایجاد می شود
در صورت برخورد تیغه فلزی به مانع و فشرده شدن کلید زیر تیغه همانند قطع و وصل شدن یک کلید، ولتاژ خروجی سوئیچ تغییر می کند.

ب) حسگرهای هم جواری (Proximity)
آشکارسازی اشیا نزدیک به روبات مهمترین کاربرد این سنسورها می باشد. انواع مختلفی از سنسورهای هم جواری نظیر: القایی، اثرهال، خازنی ، اولتراسونیک ، نوری ممکن است در رباتها مورد استفاده قرار گیرند.
سنسور اثر هال
ج) حسگرهای دوربرد ( Far away)
کاربرد اصلی این حسگرها به شرح زیر می باشد:
- فاصله سنج (لیزو و اولتراسونیک)
- بینایی (دوربین CCD)
در شکل یک زوج گیرنده و فرستنده اولتراسونیک (ماوراء صوت) نشان داده شده است. اساس کار این حسگرها بر مبنای پدیده داپلر می باشد.

سنسورهای اولتراسونیک
د) حسگر نوری (گیرنده – فرستنده)
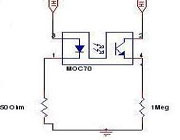
یکی از پرکاربردترین حسگرهای مورد استفاده در ساخت رباتها حسگرهای نوری هستند. حسگر نوری گیرنده- فرستنده از یک دیود نورانی (فرستنده) و یک ترانزیستور نوری (گیرنده) تشکیل شده است.
خروجی این حسگر در صورتیکه مقابل سطح سفید قرار بگیرد ۵ ولت و در صورتی که در مقابل یک سطح تیره قرار گیرد صفر ولت می باشد. البته این وضعیت می تواند در مدلهای مختلف حسگر برعکس باشد. در هر حال این حسگر در مواجهه با دو سطح نوری مختلف ولتاژ متفاوتی تولید می کند.
سنسور زوج نوری
در زیر یک نمونه مدار راه انداز زوج حسگر نوری گیرنده فرستنده نشان داده شده است. مقادیر مقاوتهای نشان داده شده در مدلهای متفاوت متغییر است و با مطالعه دیتا شیت آنها می توان مقدار بهینه مقاومت را بدست آورد.

آخرین بروزرسانی: ۱۴ اسفند ۱۳۹۹

سلام بهترین دما برای تست منشورهای NTC چه دمایی است من برای تست سنسور یخچال فریزر نیاز دارم مثلا می گویند اهم سنسور دیفراست این یخچال ۱۰ اهم است این ۱۰ اهم در چه دمایی مورد نظر است سپاس
سلام اهم سنسور بر اساس دمای معمولی است یعنی ۲۲ تا ۲۵ درجه